Traits, Attitudes, Moods, and Emotions time-varying affective control model for humanoid robotic systems
Ronald C. Arkin
Project link
Project Goal:
This project continues the objectives of the first year research conducted jointly by Georgia Tech and Samsung. Towards that end, the goal remains consistent: In order for humans to form long-term relationships with robotic artifacts, it is important that these systems display the sorts of behavior that are expected in comparable biological partners, whether they be pets or people. Humanoids in particular have high expectations from their users simply by virtue of their morphology (shape). Adding a significant affective component, derived from cognitive models of human behavior, can only enrich this relationship.
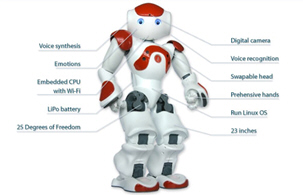
In year one of this project, we have successfully extended and developed components of the Traits, Attitudes, Moods, and Emotions (TAME) time-varying affective control model for use in humanoid robotic systems. Specifically, we provided a MissionLab implementation of TAME coupled to a humanoid robot, Nao, allowing the demonstration of the ability to convery long-term interactive affective phenomena to human observers.
In year two of this effort, we will undertake two tasks that expand upon our initial work:
- Task 1: Completion of TAME module (moods/attitudes)
In year one, we have initially implemented the traits and emotions component of the TAME architecture and have integrated them into the humanoid robotic platform as demonstrated on the Nao robot. In this second year, we will complete the perceptual and affective requirements to incorporate the remaining elements of TAME, sepecifically attitudes towards discerned objects in the environment, and moods that are affected by temporal changes (e.g., circadian rhythms). This will also involve enhancement of the existing kinesics (body language) capabilities of the platform. - Task 2: Machine learning of affective parameters
Working with Samsung researchers, we will create machine learning modules in support of affective behavior, specifically:- Using reinforcement (Q-) learning as the basis for adjusting the parameters of TAME and the underlying robotic behaviors, based on direct feedback of the user.
- Using case-based reasoning (CBR) to store situation-specific affective parameters that can support discontinuous switching of TAME behavior based on user needs and situational requirements.
|
| Nao Robot |