Project 2: Local Feature Matching

Notre Dame Example Using Cheat Points
The goal of this project was to implement a feature detection and matching program to find a match features between two images. This is very useful to create panoramas, or determine if two images are a picture of the same thing. The pipeline can be broken down in to three simple parts:
- Harris Corner Detector
- SIFT Feature Descriptors
- Feature Match
Harris Corner Detector
With the Harris Corner Dectector corners can be identified as an area where shifting the image in any direction changes the area greatly. We create the Harris Response by taking the derivative of the image with respect to both the x and y directions, which gives us Ix and Iy Using these we can create derivative products Ixx and Iyy Ixy These three matrices, which are the size of the original image give us the gradient response in the x direction, the y direction, and in the diagonal direction. The Harris Response can then be computed as: HR = (Ixx * Iyy) - (Ixy2) - (alpha*((Ixx+Iyy)2))
We can then take this response and threshold it by some amount, in order to suppress corners with a very low corner score. After this we perform non-maximum suppresion, which will ensure the returned corners are the maximum corners in a certain window.
SIFT Feature Descriptors
SIFT descriptors are created by examing a patch of pixels around a key point. The patch, which is 16x16 pixels, is then divided into 16 4x4 cells. Each of these cells create a histogram of oriented gradients. Each pixel in the cell 'votes' for one of 8 orientation based on its magnitude. Each of the 16 histograms are concatenated to create a 128 wide SIFT descriptor. Each SIFT feature is normalized, then clamped to 0.2, then renormalized. This ensures that no pixels has too much weight in the histogram.
Feature Match
With two lists of features, we next need to find which feature in image 1 matches to which feature in image 2. The simplest method to do so is called the Nearest Neighbor Distance Ratio. For every feature in image 1 we find the Euclidean distance to each feature in image 2. The match for the feature from image 1 is to the feature image 2 with the smallest distance. The confidence of the match can be described as 1/(NN1/NN2), where NN1 and NN2 are the distances to the closest neighbor and second closest neighbor. Sorting the matches by confidence and then taking the top 100 gives us the top 100 matches.
Code Snippets
Harris Corner Detector
% Image derivatives
[Ix Iy] = imgradientxy(image);
% Blur derivatives
Ix = imgaussfilt(Ix, blurSigma);
Iy = imgaussfilt(Iy, blurSigma);
% Derivative products
Ixx = Ix.^2;
Iyy = Iy.^2;
Ixy = Ix.*Iy;
% Blur derivative products
Ixx = imgaussfilt(Ixx, blurSigma);
Iyy = imgaussfilt(Iyy, blurSigma);
Ixy = imgaussfilt(Ixy, blurSigma);
% Harris response matrix
harrisResponse = (Ixx.*Iyy) - (Ixy.^2) - (alpha*((Ixx+Iyy).^2));
% Threshold and non maximal suppression
threshold = 0.1*max(harrisResponse(:));
maxFilter = colfilt(harrisResponse, [maximaSize,maximaSize], 'sliding', @max);
corners = (harrisResponse==maxFilter)&(harrisResponse>threshold);
SIFT Feature Descriptors
% Cut out patch
imagePatch = image(rowTop:rowBot,colLeft:colRight);
% Get dir and mag of keypoint
[imagePatchGradMag, imagePatchGradDir] = imgradient(imagePatch);
% Hold the current feature
feature = [];
% Get gradient mag and dir
[imagePatchGradMag, imagePatchGradDir] = imgradient(imagePatch);
% Get each cell
for cellRow=0:3
for cellColumn=0:3
% Cut out gradient mag/dir of cell
gradMag = imagePatchGradMag((cellRow*cellDimension)+1:((cellRow+1)*cellDimension),
(cellColumn*cellDimension)+1:((cellColumn+1)*cellDimension));
gradDir = imagePatchGradDir((cellRow*cellDimension)+1:((cellRow+1)*cellDimension),
(cellColumn*cellDimension)+1:((cellColumn+1)*cellDimension));
% Histogram array
histo = zeros(1,8);
for i=1:cellDimension
for j=1:cellDimension
% Get mag and dir
dir = gradDir(i,j);
mag = gradMag(i,j);
%%%% Pick histogram bin based on dir (not shown for space reasons)
% Add to bin
histo(histoIndex) = histo(histoIndex) + (mag);
end
end
% Add histogram to feature
feature = [feature histo];
end
end
% Normalize feature, clamp, renormaliz
feature = normalize(feature);
feature(feature>threshold) = threshold;
feature = normalize(feature);
% Add to features
features = [features; feature];
Feature Match
for i=1:size(features1,1)
% Get feature from features1
refFeature = features1(i,:);
% Hold distances
distances = [];
% Get distance to each feature in features2
for j=1:size(features2,1)
testFeature = features2(j,:);
featureDist = sqrt(sum((refFeature - testFeature) .^ 2));
if isnan(featureDist)
featureDist = 0;
end
distances = [distances; featureDist];
end
% Sort from lowest distance to highest
[distances, indecies] = sort(distances, 'ascend');
% Confidences are the inverse ratio of the two distances
confidence = 1/(distances(1)/distances(2));
% Add match to list of matches
match = [i indecies(1)];
matches = [matches; match];
% Add confidence
confidences = [confidences; confidence];
end
Harris Corner Detector Results

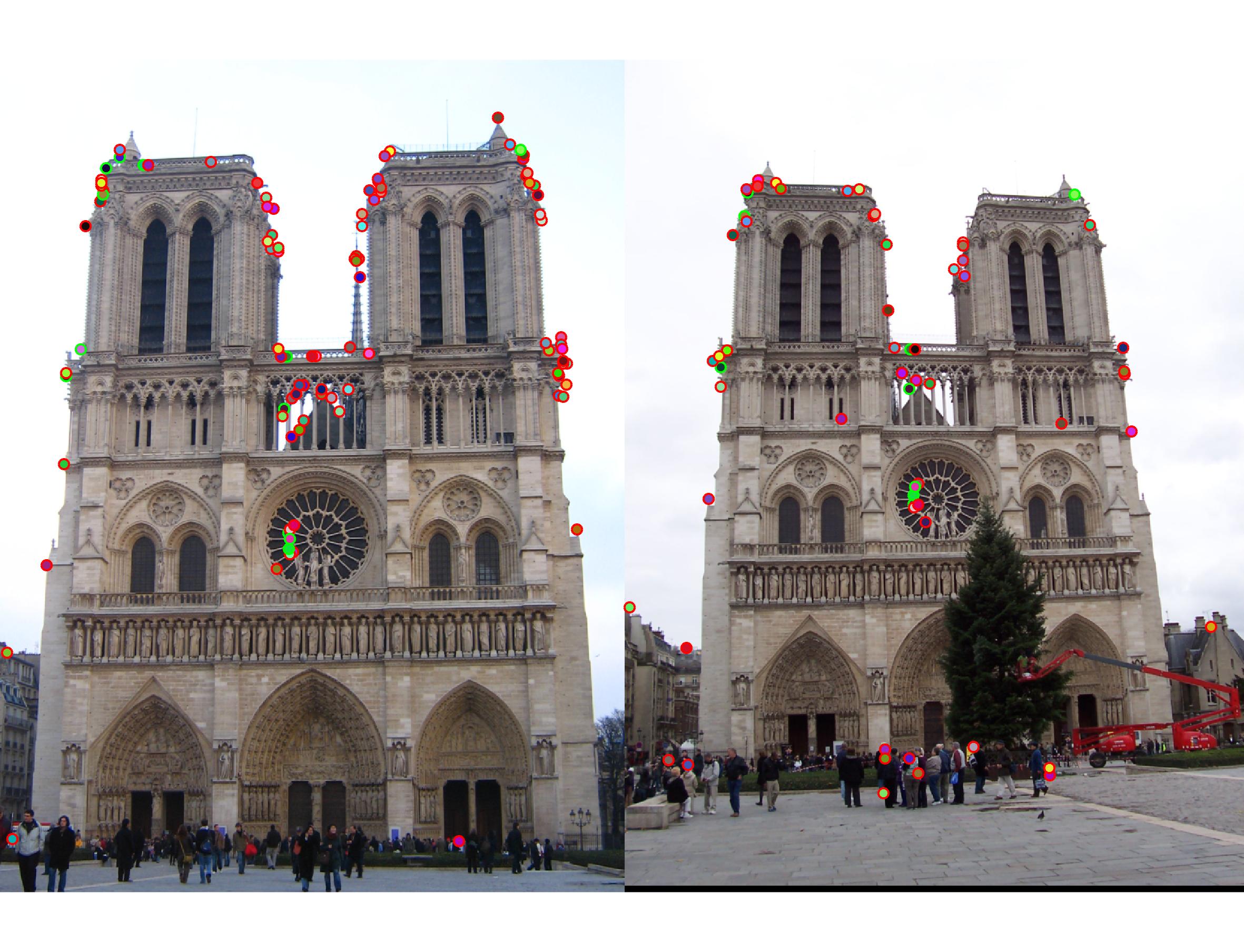
SIFT Feature Descriptors and Feature Matching with Cheat Points
All together
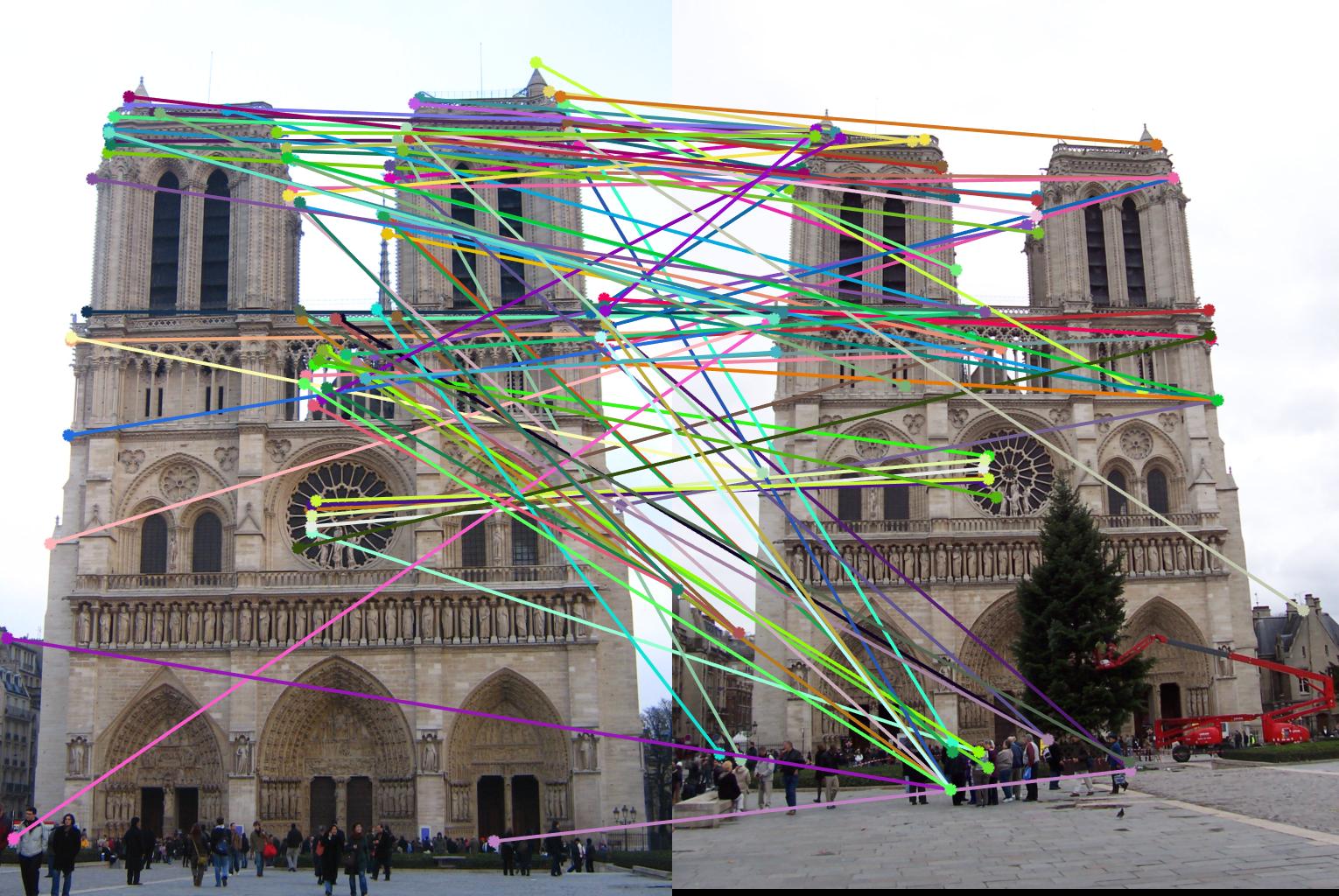
Final Thoughts and Results
With cheat points and using my own of SIFT and feature point I got 72% accuracy. This tells me that these parts of my code worked great. When I implemented my Harris Corner Detector, my accuracy dropped to about 12%. Upon examining the results of my corner detector, the corners looked very "cornery" and yet, features were matched very incorrectly. I could never figure out why this was the case. Each individual part worked correctly, but all together they did not work.